Ефективність перетворення сонячних фотоелектричних панелей найвища, коли падаюче світло потрапляє на поверхню панелі, перпендикулярну площині панелі. Враховуючи, що сонце - це постійно рухається джерело світла, це відбувається лише один раз на день із фіксованою установкою! Однак механічна система під назвою Сонячний трекер може використовуватися для постійного переміщення фотоелектричних панелей, щоб вони безпосередньо звернулися до сонця. Сонячні трекери зазвичай збільшують вихід сонячних масивів з 20% до 40%.
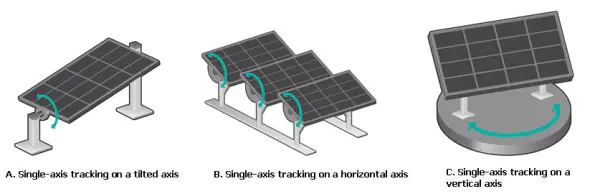
Існує багато різних конструкцій сонячних трекерів, що включають різні методи та методи виготовлення мобільних фотоелектричних панелей уважно слідувати за сонцем. Однак, принципово, сонячні трекери можна розділити на два основні типи: одноосі та подвійну осі.
Деякі типові одноосидні конструкції включають:
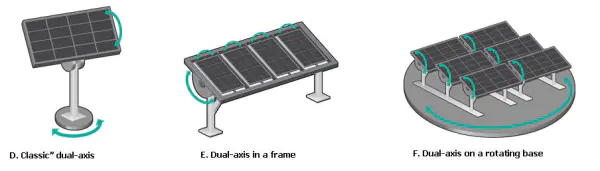
Деякі типові конструкції з подвійною осі включають:
Використовуйте елементи управління відкритим циклом, щоб приблизно визначити рух трекера, щоб слідувати за сонцем. Ці елементи керування обчислюють рух сонця з сходу сонця до заходу на основі часу встановлення та географічної широти та розробляють відповідні програми руху для переміщення PV -масиву. Однак навантаження на навколишнє середовище (вітер, сніг, лід тощо) та накопичені помилки позиціонування роблять системи з відкритим циклом менш ідеальними (і менш точними) з часом. Немає гарантії, що трекер насправді вказує, де контроль вважає, що він повинен бути.
Використання зворотного зв'язку з позицією може покращити точність відстеження та допомогти забезпечити, що сонячний масив фактично розміщений там, де вказуються елементи управління, залежно від часу доби та пори року, особливо після метеорологічних подій, пов’язаних із сильними вітрами, снігом та льодом.
Очевидно, геометрія проектування та кінематична механіка трекера допоможуть визначити найкраще рішення для зворотного зв'язку позиції. П'ять різних технологій зондування можуть бути використані для забезпечення зворотного зв'язку позиції для сонячних трекерів. Я коротко опишу унікальні переваги кожного методу.
Час посади: 30.0.2022 р.